学员(7715)
课程(185)
分享
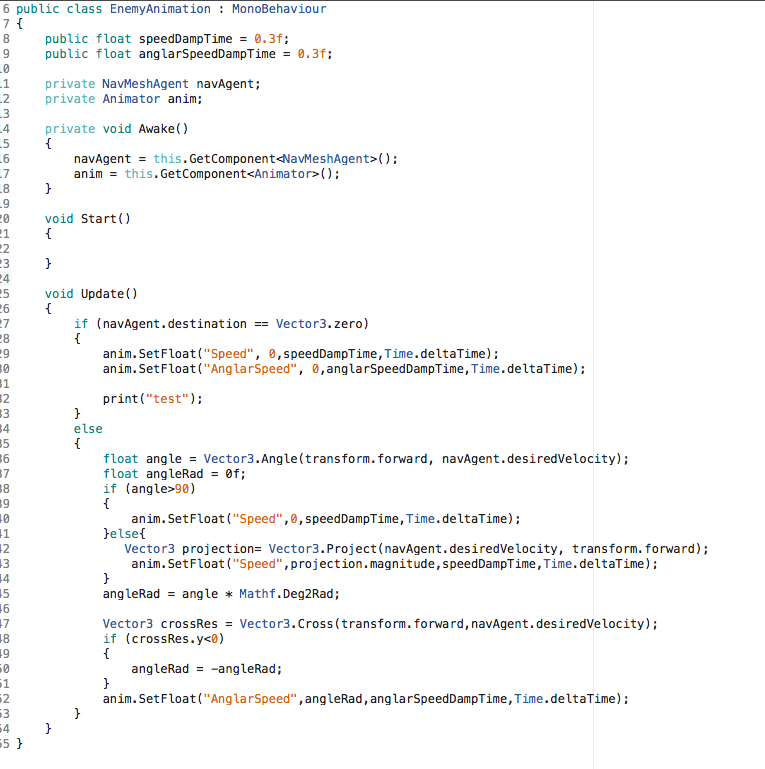
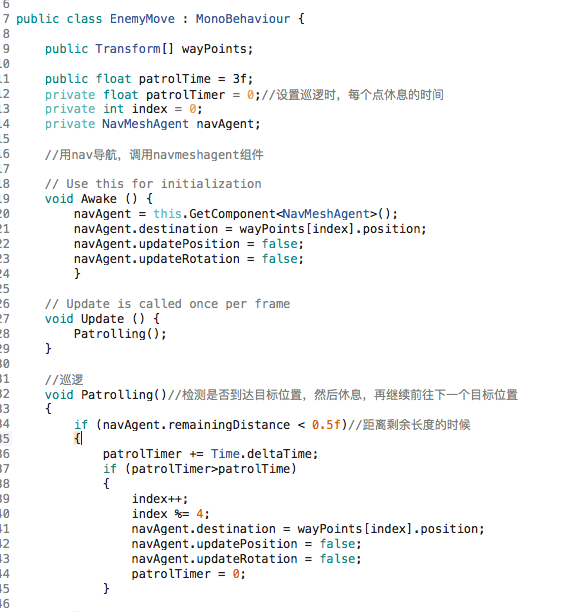
老师,机器人巡逻时,无法到达第二个waypoint,会卡在中间一直打转。。。研究了半天也没明白,请帮我看看
把EnemyAnimation中AngularSpeedDamp设置大一点
可能是因为转弯速度太小,导致一直到达不了目标点
老师,还是不行诶,无论是调大还是调小,机器人走路的距离更小了,调到1的时候就开始不走路,就在第一个waypoint那里打转
你QQ多少 我远程看看